ADS-B Workflow¶
This notebook outlines an example workflow and quality assurance/quality control steps for working with ADS-B flight trajectories.
Specifically:
Fetching of data from the ADS-B telemetry endpoint
Overview of ADS-B data fields and anatomy
Extraction of individual flight instances
Validation & QA/QC of flight instances
NOTE A flight instance refers to a the collection of waypoints representing a single flight trajectory (an instance of takeoff to landing).
Prerequisites¶
Familiarize yourself with the Contrails.org API ADS-B Telemetry endpoint.
Step 1a: Fetch two days of global ADS-B data (METHOD 1 - synchronous)¶
The following approach iteratively (synchronously) fetches 1 hour chunks of global ADS-B data from the API, and saves those data to parquet files on local disk.
This approach takes longer to run, but is easier to debug and less prone to memory or Python async management issues.
[ ]:
import os
import pandas as pd # pip install pandas
import requests # pip install requests
URL = "https://api.contrails.org"
API_KEY = os.environ["CONTRAILS_API_KEY"]
HEADERS = {"x-api-key": API_KEY}
times = pd.date_range("2025-02-01T00", "2025-02-02T23", freq="1h", inclusive="both", tz="UTC")
# iterate over datetime_range and fetch ADS-B data, saving it to local disk
destination_dir = "adsb_method1"
os.makedirs(destination_dir, exist_ok=True)
for time in times:
params = {"date": time.strftime("%Y-%m-%dT%H")}
r = requests.get(f"{URL}/v1/adsb/telemetry", params=params, headers=HEADERS, timeout=120)
r.raise_for_status()
# write out response content as parquet file
with open(f"{destination_dir}/{params['date']}.pq", "wb") as f:
f.write(r.content)
Step 1b: Fetch two days of global ADS-B data (METHOD 2 - asynchronous)¶
The following approach concurrently (asynchronously) fetches 1 hour chunks of global ADS-B data from the API, and saves those data to parquet files on local disk.
This approach has a faster runtime, but requires an understanding of memory management & Python asynchronous methods.
[ ]:
import asyncio
import os
import httpx # pip install httpx
import pandas as pd # pip install pandas
URL = "https://api.contrails.org"
API_KEY = os.environ["CONTRAILS_API_KEY"]
HEADERS = {"x-api-key": API_KEY}
times = pd.date_range("2025-02-01T00", "2025-02-02T23", freq="1h", inclusive="both", tz="UTC")
# iterate over datetime_range and fetch ADS-B data, saving it to local disk
destination_dir = "adsb_method2"
os.makedirs(destination_dir, exist_ok=True)
async def fetch_target_hour(
semaphore: asyncio.locks.Semaphore, time: pd.Timestamp, destination_directory: str
) -> None:
"""Call the telemetry endpoint for a single time, and save the parquet file to disk."""
params = {"date": time.strftime("%Y-%m-%dT%H")}
async with semaphore, httpx.AsyncClient() as client:
r = await client.get(
f"{URL}/v1/adsb/telemetry",
params=params,
headers=HEADERS,
timeout=120,
)
r.raise_for_status()
# write out response content as parquet file
with open(f"{destination_directory}/{params['date']}.pq", "wb") as f:
f.write(r.content)
async def run_routines(semaphore: asyncio.locks.Semaphore):
"""Run the fetch_target_hour() function for each time in the times list."""
routines = [fetch_target_hour(semaphore, time, destination_dir) for time in times]
await asyncio.gather(*routines)
# limit the number of concurrent tasks running at any given time
max_concurrent_tasks = 6
sem_lock = asyncio.Semaphore(max_concurrent_tasks)
await run_routines(sem_lock)
Step 2 - load data¶
Load the parquet files (fetched from Step 1) into a pandas dataframe.
[1]:
import pandas as pd
destination_dir = "adsb_method2"
df = pd.read_parquet(destination_dir) # load all pq files present in the directory
df
[1]:
| timestamp | latitude | longitude | collection_type | altitude_baro | altitude_gnss | icao_address | flight_id | callsign | tail_number | flight_number | aircraft_type_icao | airline_iata | departure_airport_icao | departure_scheduled_time | arrival_airport_icao | arrival_scheduled_time | |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 0 | 2025-02-01 00:59:59 | 25.676445 | 54.505299 | terrestrial | 36975 | NaN | 0101DE | 09fbb48d-6678-4bc8-9af2-f9cc39f5a92a | MSR951 | SU-GEU | MS951 | B789 | MS | HECA | 2025-01-31 22:20:00 | ZSPD | 2025-02-01 08:50:00 |
| 1 | 2025-02-01 00:59:59 | 29.590485 | 32.469460 | terrestrial | 28000 | NaN | 0100DB | deb06dee-361d-4f55-8240-825c0dcec2fa | MSR931 | SU-GCM | MS931 | B738 | MS | OOMS | 2025-01-31 20:10:00 | HECA | 2025-02-01 00:40:00 |
| 2 | 2025-02-01 00:59:59 | 35.852440 | -119.786217 | terrestrial | 36000 | NaN | 0D07A8 | 5c0a0363-e3e5-4ceb-8ded-49be4daac430 | VOI7712 | XA-VOY | Y47712 | A320 | Y4 | MMLO | 2025-01-31 21:38:00 | KOAK | 2025-02-01 01:56:00 |
| 3 | 2025-02-01 00:59:59 | 41.100597 | -78.485016 | terrestrial | 37000 | NaN | 0C6061 | dbd65885-f2a4-469e-b82a-c8acace589de | BWA600 | 9Y-TTO | BW600 | B38M | BW | TTPP | 2025-01-31 19:55:00 | CYYZ | 2025-02-01 02:00:00 |
| 4 | 2025-02-01 00:59:59 | 8.320747 | -79.484901 | terrestrial | 11175 | NaN | 0C21A3 | 1a0404bc-26cf-409d-ab3f-e1456391e828 | CMP132 | HP-9801CMP | CM132 | B38M | CM | SPJC | 2025-01-31 21:40:00 | MPTO | 2025-02-01 01:20:00 |
| ... | ... | ... | ... | ... | ... | ... | ... | ... | ... | ... | ... | ... | ... | ... | ... | ... | ... |
| 52280762 | 2025-02-02 23:00:00 | 35.741821 | -79.977608 | terrestrial | 27175 | NaN | A8AE7F | 0e33f482-7857-44ec-8f07-d7cd552e0be6 | DAL2855 | N659DL | DL2855 | B752 | DL | KRDU | 2025-02-02 22:35:00 | KATL | 2025-02-03 00:12:00 |
| 52280763 | 2025-02-02 23:00:00 | 32.650223 | -95.647522 | terrestrial | 23000 | NaN | AA01DE | 309893aa-4117-4898-848e-cab88a433703 | SKW6486 | N744EV | AA6486 | CRJ7 | OO | KDFW | 2025-02-02 22:35:00 | KAEX | 2025-02-02 23:50:00 |
| 52280764 | 2025-02-02 23:00:00 | 33.047882 | -96.192169 | terrestrial | 19925 | NaN | A7E9E7 | 682f72f7-4258-43f8-ac5c-a43f9b0555d1 | JIA5605 | N609NN | AA5605 | CRJ9 | OH | KDFW | 2025-02-02 22:35:00 | KLIT | 2025-02-02 23:51:00 |
| 52280765 | 2025-02-02 23:00:00 | 40.460953 | -111.951111 | terrestrial | 14125 | NaN | A32C1E | c0098d49-b0c8-46d4-9042-2e3041f013fb | SKW3737 | N303SY | DL3737 | E75L | OO | KSLC | 2025-02-02 22:35:00 | KPSP | 2025-02-03 00:29:00 |
| 52280766 | 2025-02-02 23:00:00 | 29.902313 | -94.515434 | terrestrial | 17525 | NaN | A0FE7A | 8cb8df5d-26ea-41d4-82e0-cc5d2376e9f6 | SKW5356 | N163SY | UA5356 | E75L | OO | KIAH | 2025-02-02 22:35:00 | KPNS | 2025-02-03 00:18:00 |
52280767 rows × 17 columns
Discussion - Anatomy of an ADS-B waypoint¶
The data surfaced in the ADS-B telemetry endpoint returns approximately 2 waypoints on a per-minute basis, for a given aircraft. This is a best-effort approach to provide observations at the top and bottom of a given minute’s interval.
Each ADS-B waypoint contains the following fields:
timestamp
latitude
longitude
collection_type
altitude_baro
icao_address
flight_id
callsign
tail_number
flight_number
aircraft_type_icao
airline_iata
departure_airport_icao
departure_scheduled_time
airport_arrival_icao
arrival_scheduled_time
BEWARE: in principle, all fields except latitude, longitude, altitude and timestamp (space/time) should be invariant on a per flight instance (flight_id) basis. As we will see in the data handling and QAQC section, this is often not the case… For instance, it is common to see the callsign of a flight change several minutes into the beginning of a new flight instance, etc.
Timestamp¶
This is the timestamp, in second precision, for the reported aircraft position. Timezone is UTC.
latitude & longitude¶
X,Y positional data of the aircraft at the reported timestamp.
collection_type¶
An indicator of whether these data were collected from terrestrial or sattelite receivers. Possible values for this field include terrestrial and satellite. Notably, records with collection_type of satellite do not have a flight_id (i.e. null value), as Spire is unable to assign a flight_id to these records. The data handling section further down discusses how to impute flight_ids for records that are missing them.
Please note that, starting Dec 2024, Spire is not providing any records with collection_type of satellite, as their satellite constelation was decomissioned earlier than expected given unusually high solar wear’n’tear. They do plan to gradually reimplement satellite data coverage, but volume and exact dates for those data is not clear.
altitude_baro¶
Barometric altitude of the aircraft, in feet above MSL, at the reported timestamp. Barometric altitude is imputed from the pressure measured by an aircraft’s static port and is equal to geometric altitude only under specific atmospheric conditions.
altitude_gnss¶
Geometric altitude of the aircraft, derived from GNSS satellite data, at the reported timestamp. Geometric altitude is not reported by all flights, and missing values are filled with NaN.
icao_address¶
The icao identifier of the aircraft. This is unique to the aircraft, and, for commercial jets, is typically the identifier of the aircraft’s S-type transponder. This is considered to be the most robust unique identifier for grouping all data belonging to a specific aircraft.
flight_id¶
The UUID generated by Spire as a best-effort to uniquely identify a flight instance. All waypoints grouped on a flight_id should represent the trajectory of a single flight instance. It does happen, from time to time, that the flight_id is erroneous. This is addressed in the data QA/QC section further down. As mentioned above, the flight_id is generally non-null, except for waypoints that are satellite observations.
callsign¶
The reported call sign for the aircraft on for given flight instance.
tail_number¶
The reported tail number of the aircraft.
flight_number¶
The reported flight number of the aircraft for a given flight instance.
aircraft_type_icao¶
The type of aircraft (ICAO designator).
airline_iata¶
The airline IATA designator, for flights belonging to a registered airline (this is null for general aviation).
departure_airport_icao & arrival_airport_icao¶
The departure or arrival airport (ICAO designator) for a given flight instance.
departure_scheduled_time & arrival_scheduled_time¶
The departure or arrival scheduled time for a given flight instance. Timezone is UTC.
Step 3 - Data Workflow¶
The following workflow demonstrates some common data manipulations applied to these data.
Step 3a - Filtering¶
Let’s filter our data to make subsequent data mongering more manageable, effectively minifying our dataset to only those data of interest for our hypothetical workflow.
Suppose our workflow only concerns itself with flights from American Airlines (airline_iata: AA) flights.
[2]:
filt = df["airline_iata"] == "AA"
# apply filter and only retain American Airlines waypoints
df = df[filt]
Step 3b - Flight ID imputation¶
Next, we’ll impute any missing flight_id values. As noted above, this is typically encountered for records with collection_type of satellite where Spire is unable to provide a flight_id match.
The imputation logic applies a simple heuristic. First, we sort by icao_address (first) and timestamp (second). This gives us the temporally continuous lineage of positions for each aircraft (takeoff, flight, landing, takeoff, flight, landing, etc…). We then simply forward-fill flight_id for any missing data. This assumes that a given flight instance will always have a non-null flight_id at the beginning of the flight, which is a good assumption, given that terrestrial ADS-B
observations are almost always available for an aircraft taking off from an airport.
[3]:
df = df.sort_values(["icao_address", "timestamp"], ascending=True)
df["flight_id"] = df["flight_id"].ffill()
Step 3c - Janitorial work¶
Also, let’s perform some janitorial work & remove any fragmented flight instances. Because we pulled an arbitrary time range of data, we expect that there are fragmented flights on the head and tailend of our dataset (flights that began before our time window start, or, flights that started but didn’t end before our time window end).
[4]:
# to identify flight fragments, we will find instances where the first or last waypoint in a flight have an altitude above a threshold
# any waypoints with those flagged flight_ids will be removed from the dataset
# min altitude for takeoff or landing
# highest airport in world is ~14.5k ft
alt_threshold_ft = 15_000
df = df.sort_values(["flight_id", "timestamp"], ascending=True)
[5]:
def flight_start_end_above_alt(df: pd.DataFrame) -> bool:
"""Check if the first or last waypoint in a flight is above a threshold.
Assumes dataframe is temporally sorted.
"""
start_above_thres = df["altitude_baro"].iloc[0] > alt_threshold_ft
end_above_thres = df["altitude_baro"].iloc[-1] > alt_threshold_ft
return start_above_thres or end_above_thres
pre_filter_n_waypoints = len(df)
df = df.groupby("flight_id").filter(lambda x: not flight_start_end_above_alt(x))
post_filter_n_waypoints = len(df)
print(f"Dropped {pre_filter_n_waypoints - post_filter_n_waypoints} waypoints")
Dropped 160524 waypoints
Step 3d - Flight Instance Manipulation (Resample, Heal, Validate)¶
As noted in the Discussion - Anatomy of an ADS-B waypoint section, waypoints belonging to a flight_id should represent a well-formed flight instance. Some flight instances, however, may violate one or more rules representing a well-formed flight instance.
The validation handler in Pycontrails is a utility that encapsulates a ruleset for evaluating a flight instance. The validation handler consumes a single flight instance, and, if a violation occurs, will return one or more Exceptions representing the nature of the violation(s).
SchemaError
The flight instance has waypoints with malformed or missing fields. See the SCHEMA class variable of the ValidateTrajectoryHandler (Reference)
OrderingError
The flight instance dataframe is not ordered/sorted correctly (descending timestamps).
FlightDuplicateTimestamps
The flight instance dataframe has one or more rows with duplicate timestamps.
FlightInvariantFieldViolation
The flight instance has one or more fields (columns) whose values are not invariant. A valid trajectory assumes that the values for the following fields do not vary for a given flight instance (Reference):
[
"icao_address",
"flight_id",
"callsign",
"tail_number",
"aircraft_type_icao",
"airline_iata",
"departure_airport_icao",
"departure_scheduled_time",
"arrival_airport_icao",
"arrival_scheduled_time",
]
OriginAirportError
The flight instance’s first waypoint is too far from the origin airport’s location.
DestinationAirportError
The flight instance’s first waypoint is too far from the origin airport’s location.
FlightTooShortError
The flight instance is too short (in time duration).
FlightTooLongError
The flight instance is too long (in time duration).
FlightTooSlowError
The flight instance has periods where the speed is too slow. This can either be instantaneous speed (speed imputed between consecutive waypoints) or the rolling average speed (the rolling avg speed threshold and windows width is defined in the handler’s class vars).
FlightTooLongError
Same as FlightTooSlowError accept with upper speed thresholds.
ROCDError
The rate of climb or rate of descent of the aircraft (calculated between consecutive waypoints) is above a threshold.
FlightAltitudeProfileError
The flight instance drops below an altitude (floor) during the flight.
Cleanup/Heal Trajectories¶
Before we scan the trajectories with the ValidateTrajectoryHandler, we’ll first apply some common cleanup/fixes to flight trajectories.
The heuristics applied here will eventually be encapsulated in a Handler available via the pycontrails package
[6]:
def key_max_value_count(df, column_name):
"""If multiple unique values exist in a column, return the value with the highest count.
Note that null values are not considered in the stack rank.
"""
counts = df[column_name].value_counts()
return counts.index[0] if not counts.empty else None
def get_priority_map(df: pd.DataFrame, cols: list) -> dict:
"""Return a mapping of the column name to the value of highest count in the column.
Parameters
----------
df
A pandas dataframe
cols
Names of columns for evaluation. e.g. col=["callsign", "airline_iata"]
Returns
-------
A dict with mapping of cols to value of highest count
e.g. ``{"callsign": None, "airline_iata": AA}``
"""
ret = {}
for col in cols:
prio_val = key_max_value_count(df, col)
ret[col] = prio_val
return ret
def dataframe_convert_types(df: pd.DataFrame) -> pd.DataFrame:
"""Attempt to convert types for each dataframe column to expected type.
Implicitly also checks for existence of expected columns.
"""
cols = {
"icao_address": str,
"flight_id": str,
"callsign": str,
"tail_number": str,
"flight_number": str,
"aircraft_type_icao": str,
"airline_iata": str,
"departure_airport_icao": str,
"departure_scheduled_time": "datetime64[ns]",
"arrival_airport_icao": str,
"arrival_scheduled_time": "datetime64[ns]",
"timestamp": "datetime64[ns]",
"latitude": float,
"longitude": float,
"collection_type": str,
"altitude_baro": int,
}
df = df.astype(cols)
df["ingestion_time"] = pd.NaT
return df
def drop_duplicate_ts(df: pd.DataFrame) -> pd.DataFrame:
"""Drop rows with duplicate timestamp fields."""
return df.drop_duplicates(subset="timestamp", keep="first")
def heal(df: pd.DataFrame) -> pd.DataFrame:
"""
Manipulate trajectories with qaqc heuristics.
Returns
-------
Dataset mirroring initiated dataset, with manipulations applied.
"""
try:
df = dataframe_convert_types(df)
except KeyError as e:
raise KeyError("flight trajectory dataframe is missing an expected column.") from e
df = df.replace("nan", None)
# drop dupes
df = drop_duplicate_ts(df)
# --------------
# update dataset so the following target keys are uniform/distinct for a given flight
# --------------
target_cols = [
"callsign",
"flight_number",
"arrival_airport_icao",
"departure_airport_icao",
"airline_iata",
]
priority_values = get_priority_map(df, target_cols)
# fill any null values with our priority values
for col, val in priority_values.items():
if val:
df[col] = df[col].fillna(val)
# drop any rows where our column values don't match the priority value
for col, val in priority_values.items():
if val:
keep_filter = df[col] == val
df = df[keep_filter]
df = df.sort_values(by="timestamp", ascending=True).reset_index(drop=True)
if df.empty:
raise ValueError("flight trajectory is empty.")
return df
# scan all our flight instances and apply the "heal" heuristics
# let's grab the first 100 flights from American Airlines to work with in the rest of the notebook
flight_instance_grps = df.groupby("flight_id")
healed_flights: list[pd.DataFrame] = []
for _, flight_df in flight_instance_grps:
airline_iata = flight_df["airline_iata"]
if airline_iata.iloc[0] == "AA":
healed_flights.append(heal(flight_df))
if len(healed_flights) == 100:
break
Resample flight trajectories¶
The folowing workflow demonstrates how to use the pycontrails resample_and_fill method to resample a flight trajectory to a 1minute interval of flight segments. This method also applies some cleanup and manipulation heuristics (for example, climb/descents aren’t linearly interpolated between waypoints, rather a ramp function is applied, etc…).
Note that there is some busy-work to marshal the flight dataframe into and out of a pycontrails Flight object.
[7]:
import warnings
from pycontrails import Flight
warnings.filterwarnings("ignore")
healed_resampled_flights: list[pd.DataFrame] = []
for flight_df in healed_flights:
df_tmp = flight_df.rename(columns={"altitude_baro": "altitude_ft", "timestamp": "time"})
df_resampled = Flight(df_tmp).resample_and_fill().dataframe
if df_resampled.empty:
continue
# Recompute the altitude_ft (pycontrails Flight.resample_and_fill returns altitude [m])
df_resampled["altitude_baro"] = df_resampled.pop("altitude").multiply(3.28).astype(int)
df_resampled = df_resampled.rename(columns={"time": "timestamp"})
# resample_and_fill drops all of our metadata columns (everything accept lat, lon, time, altitude)
# so we need to patch that back in
# note that our healing process in the previous step guarantees that all of those metadata fields are invariant in value
# thus we're safe to grab any row's value from the input df and patch into the output df
# collection_type and ingestion_time are exceptions. There is no handling of those fields when interpolating between records
# here, we just mask the value with null, to preserve schema
col_patches = [
"icao_address",
"flight_id",
"callsign",
"tail_number",
"flight_number",
"aircraft_type_icao",
"airline_iata",
"departure_airport_icao",
"departure_scheduled_time",
"arrival_airport_icao",
"arrival_scheduled_time",
"collection_type",
]
for col in col_patches:
df_resampled[col] = flight_df[col].iloc[0]
df_resampled["ingestion_time"] = pd.NaT
df_resampled["collection_type"] = None
df_resampled = df_resampled.sort_values("timestamp", ascending=True)
healed_resampled_flights.append(df_resampled)
healed_resampled_flights[0]
[7]:
| longitude | latitude | timestamp | altitude_baro | icao_address | flight_id | callsign | tail_number | flight_number | aircraft_type_icao | airline_iata | departure_airport_icao | departure_scheduled_time | arrival_airport_icao | arrival_scheduled_time | collection_type | ingestion_time | |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 0 | -107.055359 | 39.577457 | 2025-02-02 00:10:00 | 13971 | AC7581 | 0007726f-28fc-4add-ade5-fae5d07542bf | AAL2165 | N9012 | AA2165 | A319 | AA | KEGE | 2025-02-02 00:02:00 | KDFW | 2025-02-02 02:20:00 | None | NaT |
| 1 | -107.109846 | 39.625671 | 2025-02-02 00:11:00 | 17280 | AC7581 | 0007726f-28fc-4add-ade5-fae5d07542bf | AAL2165 | N9012 | AA2165 | A319 | AA | KEGE | 2025-02-02 00:02:00 | KDFW | 2025-02-02 02:20:00 | None | NaT |
| 2 | -107.094761 | 39.698813 | 2025-02-02 00:12:00 | 19884 | AC7581 | 0007726f-28fc-4add-ade5-fae5d07542bf | AAL2165 | N9012 | AA2165 | A319 | AA | KEGE | 2025-02-02 00:02:00 | KDFW | 2025-02-02 02:20:00 | None | NaT |
| 3 | -106.996112 | 39.767361 | 2025-02-02 00:13:00 | 21257 | AC7581 | 0007726f-28fc-4add-ade5-fae5d07542bf | AAL2165 | N9012 | AA2165 | A319 | AA | KEGE | 2025-02-02 00:02:00 | KDFW | 2025-02-02 02:20:00 | None | NaT |
| 4 | -106.856049 | 39.822471 | 2025-02-02 00:14:00 | 22874 | AC7581 | 0007726f-28fc-4add-ade5-fae5d07542bf | AAL2165 | N9012 | AA2165 | A319 | AA | KEGE | 2025-02-02 00:02:00 | KDFW | 2025-02-02 02:20:00 | None | NaT |
| ... | ... | ... | ... | ... | ... | ... | ... | ... | ... | ... | ... | ... | ... | ... | ... | ... | ... |
| 90 | -97.067077 | 32.896418 | 2025-02-02 01:40:00 | 774 | AC7581 | 0007726f-28fc-4add-ade5-fae5d07542bf | AAL2165 | N9012 | AA2165 | A319 | AA | KEGE | 2025-02-02 00:02:00 | KDFW | 2025-02-02 02:20:00 | None | NaT |
| 91 | -97.063822 | 32.894102 | 2025-02-02 01:41:00 | 774 | AC7581 | 0007726f-28fc-4add-ade5-fae5d07542bf | AAL2165 | N9012 | AA2165 | A319 | AA | KEGE | 2025-02-02 00:02:00 | KDFW | 2025-02-02 02:20:00 | None | NaT |
| 92 | -97.060568 | 32.891786 | 2025-02-02 01:42:00 | 774 | AC7581 | 0007726f-28fc-4add-ade5-fae5d07542bf | AAL2165 | N9012 | AA2165 | A319 | AA | KEGE | 2025-02-02 00:02:00 | KDFW | 2025-02-02 02:20:00 | None | NaT |
| 93 | -97.057313 | 32.889470 | 2025-02-02 01:43:00 | 774 | AC7581 | 0007726f-28fc-4add-ade5-fae5d07542bf | AAL2165 | N9012 | AA2165 | A319 | AA | KEGE | 2025-02-02 00:02:00 | KDFW | 2025-02-02 02:20:00 | None | NaT |
| 94 | -97.054059 | 32.887154 | 2025-02-02 01:44:00 | 774 | AC7581 | 0007726f-28fc-4add-ade5-fae5d07542bf | AAL2165 | N9012 | AA2165 | A319 | AA | KEGE | 2025-02-02 00:02:00 | KDFW | 2025-02-02 02:20:00 | None | NaT |
95 rows × 17 columns
Run the ValidateTrajectoryHandler¶
⚠️ Use version of pycontrails 0.54.8 or later
The following workflow demonstrates how to run the validation handler against flight instances.
We iterate over all the flight instances (groups of waypoints on a per flight_id basis), and for each flight instance, we ask whether or not the flight validates any rules in the ValidateTrajectoryHandler ruleset. We segregate flight instances that have no violations, and we quarantine flight instances that violate one or more rules.
Monkeypatching Custom Thresholds If you want to modify the thresholds used in the ruleset, you can monkey patch the class vars of the handler. See example below.
[8]:
from pycontrails.datalib.spire import ValidateTrajectoryHandler
# iterate through our list of flight instance dataframes, and run the validation handler against each flight
# the validation handler will return a list of exception objects if a flight violates one or more rules
# (See the description of exceptions in Step 3c)
good_flights: list[pd.DataFrame] = []
bad_flights: list[tuple[pd.DataFrame, list[Exception]]] = []
vh = ValidateTrajectoryHandler()
vh.AIRPORT_DISTANCE_THRESHOLD_KM = 500.0 # relax threshold distance for origin/destination airports
for flight_df in healed_resampled_flights:
vh.set(flight_df)
violations = vh.evaluate()
augmented_flight_df = vh.validation_df
vh.unset()
if violations:
bad_flights.append((augmented_flight_df, violations))
else:
good_flights.append(flight_df)
print(
f"Found {len(good_flights)} flights with no violations.\n"
f"Found {len(bad_flights)} flights with one or more violations."
)
Found 90 flights with no violations.
Found 8 flights with one or more violations.
Useful Helper: The “Validation Dataframe object”¶
Notice that in the above code block, we access the validation_df property of the ValidateTrajectoryHandler instance. This is a dataframe that includes all of the input dataframe values AND additional columns for the imputed fields used in evaluating the flight.
These additional columns can be very helpful in assessing a flight instance that has one or more violations. This valudation_df can also be a bonus/helpful utility for gaining access to these additional values, even for totally valid flight instances.
The additional values (columns) added to the validation_df property dataframe by the ValidateTrajectoryHandler include:
elapsed_seconds (elapsed time between consecutive waypoints)
elapsed_distance_m (elapsed distance between consecutive waypoints)
ground_speed_m_s (speed between consecutive waypoints)
rocd_fps (rate of climb/descent between consecutive waypoints)
departure_airport_lon (longitude of the departure airport)
departure_airport_lat (latitude of the departure airport)
departure_airport_alt_ft (altitude of the departure airport)
arrival_airport_lon (longitude of the arrival airport)
arrival_airport_lat (latitude of the arrival airport)
arrival_airport_alt_ft (altitude of the arrival airport)
departure_airport_dist_m (distance from the current wayporiunt to the departure airport)
arrival_airport_dist_m (distance from the current waypoint to the arrival airport)
Bad flights? What’s next…¶
The ValidateTrajectoryHandler applies a strict and opinionated set of rules to a flight instance. It is up to you, the implementer, to determine how you’d like to handle violations to the rules.
Some options include:
monkey patching the handler with less strict thresholds (see example above where we relax the ROCD threshold)
ignore certain violations, but honor others (this can be done by scanning and selectively handling the list of violations returned by the handler)
selectively ignore certain violations, for instance, ignore a FlightTooFastError if there are fewer than 5 instances of the flight going too fast (this can be achieved by parsing the exception response message in a FlightTooFastError violation)
selectivey heal certain violations, for instance, interpolate the first waypoint in a trajectory to the departure airport, for flights with an OriginAirportError violation.
Bad flight – case study¶
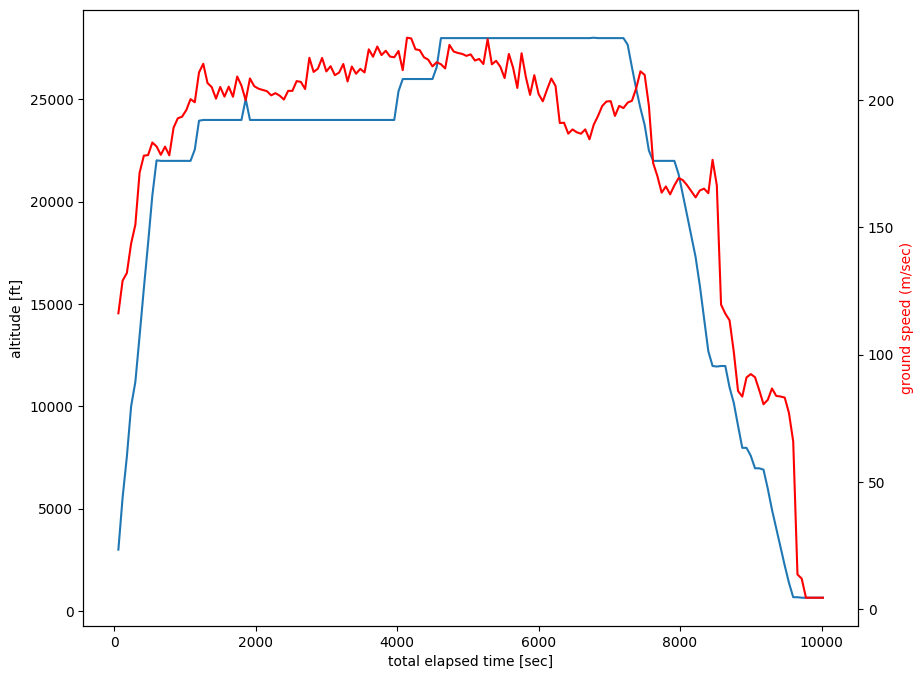
From above, we see that our second flight w/ flight_id of 01fe97aa-173c-4041-906e-f1e9193502dd has a FlightTooSlowError with message of "Found 4 instances where rolling average speed is below threshold of 100.0 m/s (rolling window of 30.0 minutes). max value: 99.56874690879854, min value: 83.59578017138627", indicating that at 4 points in the trajectory, the rolling average speed dropped below the validation handler’s threshold.
[9]:
import matplotlib.pyplot as plt
df = bad_flights[2][0]
df.loc[:, "total_elapsed_sec"] = df["elapsed_seconds"].cumsum()
fig, ax1 = plt.subplots(1, 1, figsize=(10, 8))
ax1.plot(df["total_elapsed_sec"], df["altitude_baro"])
ax1.set_ylabel("altitude [ft]")
ax1.set_xlabel("total elapsed time [sec]")
ax2 = ax1.twinx()
ax2.plot(df["total_elapsed_sec"], df["ground_speed_m_s"].abs(), color="r")
ax2.set_ylabel("ground speed (m/sec)", color="r")
plt.show()
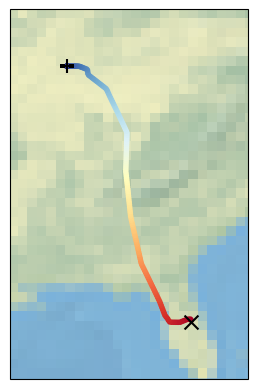
[10]:
# plot flight trajectory -- visually inspect for anomalies
import cartopy.crs as ccrs
ax = plt.axes(projection=ccrs.PlateCarree())
ax.stock_img()
cm = plt.cm.get_cmap("RdYlBu")
plt.scatter(
df["longitude"],
df["latitude"],
marker=".",
c=df["total_elapsed_sec"],
cmap=cm,
transform=ccrs.Geodetic(),
)
plt.scatter(
df["departure_airport_lon"].iloc[0],
df["departure_airport_lat"].iloc[0],
marker="x",
color="black",
s=100,
)
plt.scatter(
df["arrival_airport_lon"].iloc[0],
df["arrival_airport_lat"].iloc[0],
marker="+",
color="black",
s=100,
)
ax.set_xlim([df["longitude"].min() - 3, df["longitude"].max() + 3])
ax.set_ylim([df["latitude"].min() - 3, df["latitude"].max() + 3])
plt.show()
Discussion¶
An initial inspection of this flight suggests that it is a valid flight, and the low speed observed in the last ~ hour of flight time does not suggest an issue with the flight. Decreasing the default AVG_LOW_GROUND_SPEED_THRESHOLD_MPS. Increasing the rolling average window width (AVG_LOW_GROUND_SPEED_ROLLING_WINDOW_PERIOD_MIN) may also smooth out and avoid triggering on shorter periods of low ground speed.
In general, this type of threshold parameter tuning should be caried out in the context of the application use case, and judgements based on acceptable false positive and false negative rates.